Thermal mass flow meters are used in the monitoring and/or controlling of mass-related processes – such as chemical reactions – that depend on the relative masses of unreacted ingredients. In detecting the mass flow of compressible vapors and gases, the measurement is unaffected by changes in pressure and/or temperature. One of the capabilities of thermal mass flow meters is to accurately measure low gas flow rates or low gas velocities (under 25 ft. per minute) – much lower than can be detected with any other device.
Thermal mass flow meters are available in high-pressure and high-temperature designs – and in special materials including glass, Monel®, and PRA. Flow-through designs are used to measure small flows of pure substances (heat capacity is constant if a gas is pure), while bypass and probe-type designs can detect large flows in ducts, flare stacks, and dryers.
Theory of Operation
Thermal mass flow sensors operate either by introducing a known amount of heat into the flowing stream and measuring an associated temperature change or by maintain a probe at a constant temperature and measuring the energy required to do so.The components of a basic thermal mass flow meter include two temperature sensors and an electric heater between them. The heater can protrude into the fluid stream (Figure 1), or can be external to the pipe (Figure 2).
In the direct-heat version, a fixed amount of heat (q) is added by an electric heater. As the process fluid flows through the pipe, heat is drawn, and resistance temperature detectors (RTDs) measure the temperature rise while the amount of electric heat introduced is held constant. Usually, Pt100 type RTDs are used for this temperature measurement. Once the fluid starts to circulate in the measuring tube, the heated temperature sensor is cooled by the fluid's motion, with the speed of the flow determining the degree of cooling. As a result, the electric current needed to keep the temperature difference constant is a direct indication of mass flow.
The mass flow (m) is calculated on the basis of the measured temperature difference (T2-T1), the meter coefficient (K), the electric heat rate (q), and the specific heat of the fluid (Cp), as follows: m = Kq/(Cp(T2-T1))
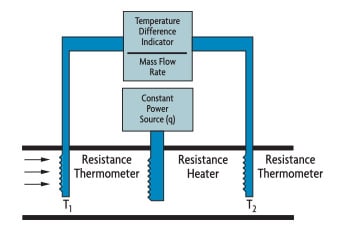 FIGURE 1: IMMERSION HEATER
FIGURE 1: IMMERSION HEATER
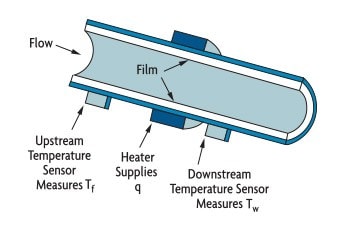 FIGURE 2: EXTERNALLY-HEATED TUBE
FIGURE 2: EXTERNALLY-HEATED TUBE
Types of Thermal Flow Meters
Heated Tube Design
Heated tube flow meters were developed to protect the heater and sensor elements from corrosion and any coating effects of the process. By mounting the sensors externally to the piping (Figure 2), the sensing elements respond more slowly, and the relationship between mass flow and temperature differences become nonlinear. This nonlinearity results from the fact that the heat introduced is distributed over some portion of the pipe's surface and transferred to the process fluid at different rates along the length of the pipe.
The pipe wall temperature is highest near the heater (detected as Tw in Figure 2), while, some distance away, there is no difference between wall and fluid temperature. Therefore, the temperature of the unheated fluid (Tf) can be detected by measuring the wall temperature at this location further away from the heater. This heat transfer process is non-linear, and the corresponding equation differs from the one above as follows: m0.8 = Kq/(Cp(Tw – Tf)).
This flow meter has two operating modes: one measures the mass flow by keeping the electric power input constant and detecting the temperature rise. The other mode holds the temperature difference constant and measures the amount of electricity needed to maintain it. This second mode of operation provides for a much higher meter rangeability.
Bypass-Type Design
The bypass version of the thermal mass flow meter was developed to measure larger flow rates. It consists of a thin-walled capillary tube (approximately 0.125 in diameter) and two externally wound self-heating resistance temperature detectors (RTDs) that both heat the tube and measure the resulting temperature rise (Figure 3). The sensor is placed in a bypass around a restriction in the main pipe and is sized to operate in the laminar flow region over its full operating range.
When there is no flow, the heaters raise the bypass-tube temperature to approximately 160°F above ambient temperature. Under this condition, a symmetrical temperature distribution exists along the length of the tube (Figure 4). When flow is taking place, the gas molecules carry the heat downstream, and the temperature profile is shifted in the direction of the flow. A Wheatstone bridge connected to the sensor terminals converts the electrical signal into a mass flow rate proportional to the change in temperature.
The small size of the bypass tube makes it possible to minimize electric power consumption and to increase the speed of response of the measurement. n the other hand, because of the small size, filters are necessary to prevent plugging. One serious limitation is the high-pressure drop (up to 45 psi) needed to develop laminar flow. This is typically acceptable only for high-pressure gas applications where the pressure needs to be reduced in any case.
This is a low accuracy (2% full scale), low maintenance, and low-cost flow meter. Electronic packages within the units allow for data acquisition, chart recording, and computer interfacing. These devices are popular in the semiconductor processing industry. Modern day units are also available as complete control loops, including a controller and automatic control valve.
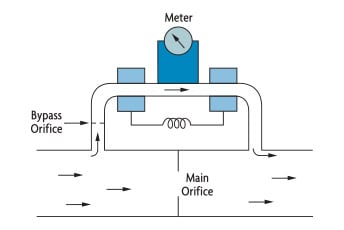 FIGURE 3: BYPASS USES SMALL PERCENT OF STREAM
FIGURE 3: BYPASS USES SMALL PERCENT OF STREAM
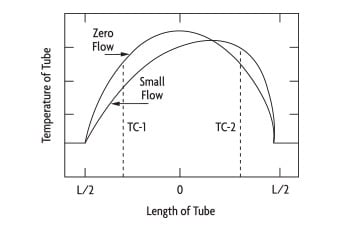 FIGURE 4: TEMPERATURE PROFILE
FIGURE 4: TEMPERATURE PROFILE
Air Velocity Probes
Probe-style mass flow sensors are used to measure air flows and are insensitive to the presence of moderate amounts of dust. They maintain a temperature differential between two RTDs mounted on the sensor tube. The upper sensor measures the ambient temperature of the gas (Figure 5) and continuously maintains the second RTD (near the tip of the probe) at 60°F above ambient. The higher the gas velocity, the more current is required to maintain the temperature differential.
Another version of the velocity probe is the venturi-type thermal mass flow meter, which places a heated mass flow sensor at the minimum diameter of a venturi flow element and a temperature compensation probe downstream (Figure 6). An inlet screen mixes the flow to make the temperature uniform. This design is used for both gas and liquid measurement (including slurries), with flow range a function of the size of the venturi. Pressure drop is relatively low, and precision is dependent upon finding the proper probe insertion depth.
A flow switch version is also available that contains two temperature sensors in the tip. One of the sensors is heated and the temperature difference is a measure of velocity. The switch can be used to detect high or low flow within 5%.
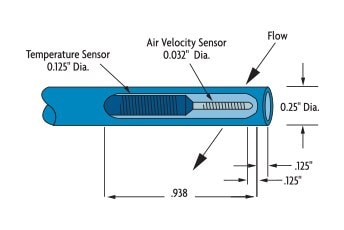 FIGURE 5: PROBE CONFIGURATION
FIGURE 5: PROBE CONFIGURATION
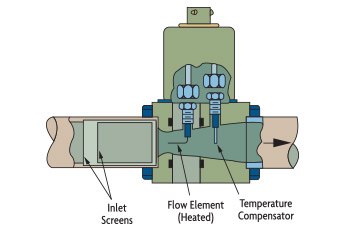 FIGURE 6: VENTURI INSERTION
FIGURE 6: VENTURI INSERTION
How Wire Anemometers
The term anemometer was derived from the Greek words anemos, "wind," and metron, "measure." Mechanical anemometers were first developed back in the 15th century to measure wind speed.
A hot-wire anemometer consists of an electrically heated, fine-wire element (0.00016 inch in diameter and 0.05 inch long) supported by needles at its ends (Figure 7). Tungsten is used as the wire material because of its strength and high-temperature coefficient of resistance. When placed in a moving stream of gas, the wire cools; the rate of cooling corresponds to the mass flow rate.
The circuitry of the heated sensing element is controlled by one of two types of solid-state electronic circuits: constant-temperature or constant-power. The constant-temperature sensor maintains a constant temperature differential between a heated sensor and a reference sensor; the amount of power required to maintain the differential is measured as an indication of the mass flow rate.
Constant-temperature anemometers are popular because of their high-frequency response, low electronic noise level, immunity from sensor burnout when airflow suddenly drops, compatibility with hot-film sensors, and their applicability to liquid or gas flows.
Constant-power anemometers do not have a feedback system. Temperature is simply proportional to flowrate. They are less popular because their zero-flow reading is not stable, temperature and velocity response is slow, and temperature compensation is limited.
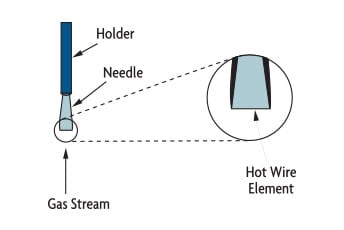 FIGURE 7: HOT WIRE ANEMOMETER
Product Info
FIGURE 7: HOT WIRE ANEMOMETER
Product Info

What Is An Anemometer And What Does It Measure?
Introduction to Air Velocity Measurement
Technical Learning

Product Info
What Is An Anemometer And What Does It Measure? Introduction to Air Velocity Measurement
Technical Learning